As identified in our notes about developing subsea propulsion, any motor driven movement becomes a significant challenge underwater due to challenge of sealing the interface of two moving surfaces. For an ROV manipulator, it is only more severe. Here, one adds additional seals and slip rings for every axis of motion imparted to a manipulator. Designing an electrically driven arm introduces a large risk to the entire robot given the added capacity for leaks and subsequent short circuits.
To address this shortfall in electrically driven arms, we are undertaking the development of a hydraulic manipulator. This system would have centralized electronics enclosure and hydraulic cylinders to control hydraulic fluid through the arm and achieve motion in a manner similar to arms on heavy equipment.
At present, we have a prototype for single axis of motion manipulator. The arm is fitted with a hydraulic claw and a single rotating axis which enables turning of subsea valves. For the near future, we will focus development on this single axis arm as it will set the framework for a microprocessor controlled hydraulic system which could be scaled to include additional joints in the manipulator such as an elbow to more complex motion.
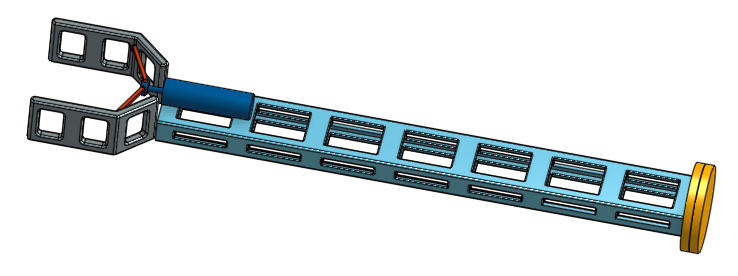
Initial single axis of motion hydraulic arm for grabbing and turning.