In this week I developed a new design for pneumatic curling. Instead of the spines being internal, I tried to extrude them. First I developed a CAD model for the mold which ended up being split into three parts:

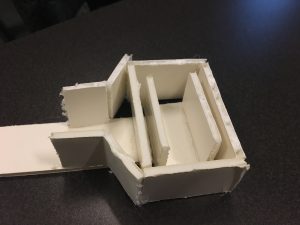
When constructed the parts look like this for the mold:

Finally after the silicone has cured and been removed from the mold, it looks like:

The movement of this mold is much more extreme than the previous design. Specifically it appears to take much less air to cause a full curvature of the silicone. Also of note this design appears to be more manageable for air leaks and fixes, and the air channels are less likely to clog. Overall, however, the need to remove air bubbles is crucial for both this design and the previous silicone designs, as air is most like to alter a uniform distribution and focus to weak areas of the silicone.