Week 3 – Jan 29-Feb 4
Further material/design exploration for purring CuddleBit.
Silicone body
First pass at attempting to cast a silicone body. Used some bowls scavenged from my house as a mold (that stuff’s not toxic, right…?).
Ran into some trouble with the liquid rubber material – it was a little difficult to mix and pour, and as a result the cast did not seem to be terribly successful. Some parts still haven’t cured yet (it has now been almost a week), and it seems that it will likely remain this way. Will try again with new material.

First pass at casting with liquid rubber.
Motor adjustments
Minor tweaks to the frequency of the purring motor. As previously noted, in designs where the motor is entirely encased in a quasi-fluid (as opposed to on top of a water cushion), lower frequencies transmit better.
IMG_0928
Combined design
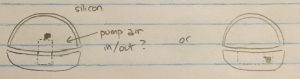
Toyed with the idea of mixing DOFs – in particular, breathing and purring.
Two particular designs that came to mind were 1) silicone air “bubble” with the purring motor embedded in a thick silicone base, with hydraulics/pneumatics for breathing motions 2) same base, but a skeleton ribcage embedded in a thin layer of silicon for breathing motions.
1)
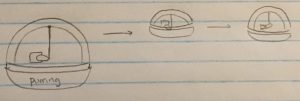
2) 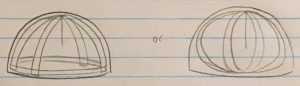
Another design that we briefly considered was 3) to have the same purring bottom, but a skeleton-only top.