Week 1 – Jan 15-21.
Begin design for purring CuddleBit.
First pass at a “purring motor” consisted of a DC motor with a small, attached weight, wrapped in several layers of bubble wrap and plastic to ensure that the weight will not come in contact with anything as the motor spins.

First pass at purring motor.
Testing out the “fluid body” idea – that the sensation of a purring creature can be successfully conveyed by attaching the purring motor to a water base (here a Ziploc filled with water). The idea is that this kind of body can simulate the weight of a small creature, and is simultaneously a good medium for transmitting the purring vibrations. So far it seems to be going quite well.
IMG_0878|
Purring motor in action.
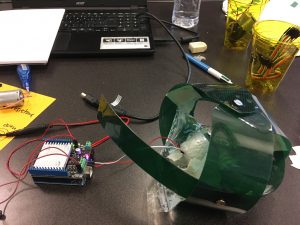
Testing purring motor setup with temporary robot body.
Borrowed a previous robot body to test if vibrations can transmit through a semi-rigid skeleton. Also seems to work quite well.