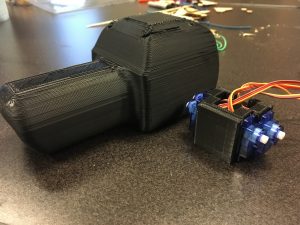
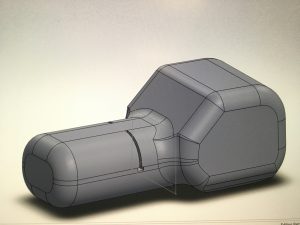
Since this was the week of our COGS 344 presentation, I spent most of it collecting past robot designs and preparing to present. The currently printed body is not able to display the behaviors I had hoped, so I’m planning on bringing it in without the motors and relying on my video of the wood-block prototype to illustrate the intended range of motion. I also spent a lot of time leading up to the presentation trying to finish a better 3D model to demonstrate in my presentation and hopefully use in the future.
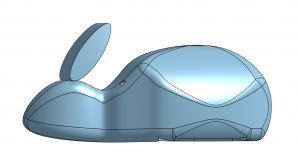
The “ears” in this image are there just to illustrate what this would look like if printed with attached ears.
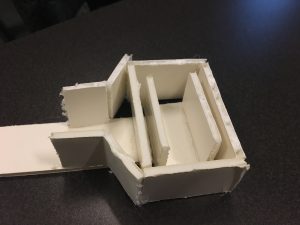
Despite the fact that most people I have asked have seen my prototypes as heads rather than bodies, I have chosen to commit to creating a body instead for several reasons. First, this design is more mechanically consistent with the wood-block prototype i created earlier. The strings that control the ears full backward rather than down as they did in my previous print. That downward motion meant that the ears did not behave as expected. Beyond that, using a head as a model presents difficulties in terms of later testing. A disembodied head on a table is weird, and would need to be incorporated into a body of some kind. Designing an entire body instead eliminates this problem.
At the time of my COGS 402 final deliverable, this is the most recent prototype I have, and the result of many weeks of constant sketching, prototyping, and failing across a number of physical and digital mediums. More than anything, I would say this experience has illustrated to me how important the “rapid” part of rapid prototyping is. The amount of time I spent struggling to learn to use 3D modelling tools to realize my ideas dramatically slowed my progress toward creating a usable robot. One of my personal goals for this project was to learn how to 3D model, and in that way I was successful, but I probably should have spent more time on lower fidelity prototypes before devoting so much time to learning an entirely new tool from scratch. Regardless, my time in SPIN Lab was an amazing and fun learning experience, and one which I would highly recommend to future 402 students.