This week, I finished creating a first body model in Solidworks. This model has slots in the rear to accommodate the four control motors, as well as a groove in the front where I will be able to attach the ears. I was hoping to attach an additional groove to the rear section of the model, but was not able to create it in Solidworks before the end of the week, and wanted to have a print ready before our week long break.
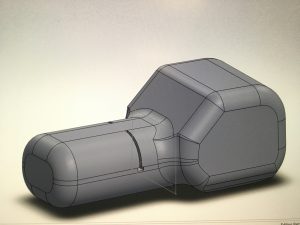
I’m not super happy with the shape I ended up with, since it doesn’t look very natural. Given the time restraints though, I think it will be important to print this body now and learn from my mistakes so that a future body will (hopefully) look more natural and compelling, and have a more thought out internal mechanism.






