Our project was able to determine the feasibility of driving a variety of electric, hybrid and gasoline powered vehicles from UBC, Vancouver, to UofT, Toronto. The various routes are displayed below:
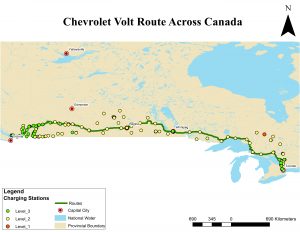
Figure 1. Map of the route for the Chevrolet Volt (Hybrid) from UBC to UofT.
This hybrid vehicle is able to make the trip across Canada in 7.39 days by following the route in Figure 1. It is possible to drive 64% of the way using electric power. For the other 36% of the trip, gasoline will need to be used to supplement the lack of near enough charging stations along the way. To travel this distance, the hybrid vehicle would need to make 35 stops (23 at a level 2 charging station, 12 at a level 3 charging station).
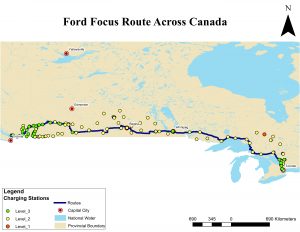
Figure 2. Map of the route for the Ford Focus (Electric) from UBC to UofT.
This standard electric vehicle is able to complete the journey in 7.77 days by following the route displayed in Figure 2. In order to complete this route, the Ford Focus would need to make 35 stops (25 at a level 2 charging station, 10 at a level 3 charging station). It is important to note that there were 8 instances in which the 122km range of this car was not sufficient to reach a charging station. In order for this car to make the entire journey, 8 charging stations would have to be added along the route to fill these gaps.
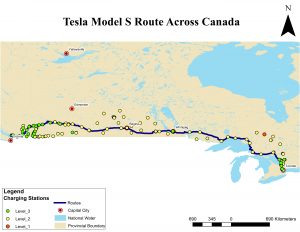
Figure 3. Map of the route for the Tesla Model S (Electric) from UBC to UofT.
This high end electric vehicle can drive from Vancouver to Toronto in 3.4 days using the route shown in Figure 3. 8 charging station stops are needed to travel this route (6 at a level 2 charging station, 2 at a level 3 charging station).
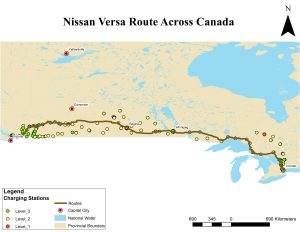
Figure 4. Map of the route for the Nissan Versa (gasoline) from UBC to UofT.
This standard gasoline powered vehicle can make the journey along the route displayed in Figure 4 in 2.08 days.
Limitations:
Most of the limitations of this study revolve around using buffer zones over service areas for the charging stations. Since we could not use service areas to work with features outside of the network analysis, we were limited to using buffer zones, which are solely based on distance. They do not consider travel time and road curvature as the service areas do. Buffer zones also project 360 degrees away from the point of interest. However, for our project, our result would have been more accurate if they projected 180 degrees from the point of interest.
Creating buffer zones around the charging stations sometimes led the route off of the main highway in an attempt to go through the lower friction value roads near a charging station that the car does not need to stop at, as can be seen in Figure 5.

Figure 5. Section of the Chevy Volt route through Manitoba where the route favours lower friction value roads over the most efficient route.
Another limitation involved the friction values for polylines with different level charging stations taking precedence over the ability of the vehicle to reach the next charging station at all. This is because the buffer zone goes outwards from the charging station in 360 degrees, rather than projecting only in the forward direction. For example, Figure 6 shows the route going through a level 3 charging station because the polyline with this charging station has a lower friction value. However, the buffer zone actually ends before the vehicle can make it to that charging station. In this scenario, it would likely be more worthwhile to travel to a lower level charging station in Brooks that the vehicle could actually reach, even though it has a higher friction value.

Figure 6. Section of the Ford Focus route near Calgary where a lower friction value due to the level 3 charging station (green point) was favoured over the route through Brooks, even though the car cannot reach the next charging station without going through Brooks.