One more week down, with leaves just under two weeks left until I’ll be giving a presentation and demonstration of ECHO at the 2024 UBC Bang! Festival. This week has very much been a one-step forward, two-steps back sort of week.
Battery
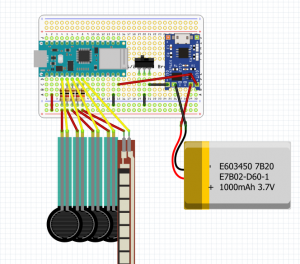
There was an unfortunate incident this past weekend that involved me accidentally breaking off the wires of where the Li-Po battery connected to the TP-4056. Don’t worry though, because I was able to clear out the solder and reattach it. I was also able to follow my Fritzing diagram from two weeks ago to complete the rest of the wiring needed to connect my TP-4056 and power On/Off switch.
However, the first test was unsuccessful. Thankfully, Dr. Bob was able to help me identify that a bit of the copper on my breadboard was missing and breaking the circuit. By adding some extra solder we were able to bridge the connection and solve the issue!
3DPrinting
The 3D printer that I’ve been using throughout this project in the music technology classroom started malfunctioning a bit this week, so my 3D printing has forcibly been put on hold until the issue is resolved. I still spent some time finishing up my latest designs so that they’ll be ready to print as soon as the printer is.
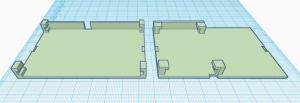
Changes from last week include streamlining it to be as compact as possible and adding clips to the interior trays so that they could detach and reattach to each other if repairs are needed instead of glueing them together as originally planned.
Box with snap-on lidInterior trays to securely hold breadboard and Li-Po batteryKey clips with snap-on bottoms to protect sensor connections
A: Because it had too many unresolved issues and couldn’t find its ground!
Circuit Board
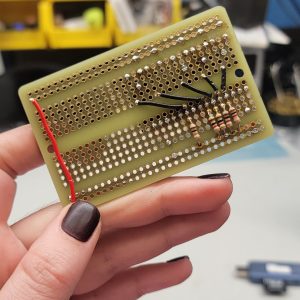
Okay, so the beautiful fritzing diagram I designed last week may not have worked out as well when Dr. Bob and I tried to go off-road a bit to connect the JST connectors to the same board instead of a separate smaller one like we were thinking last week.
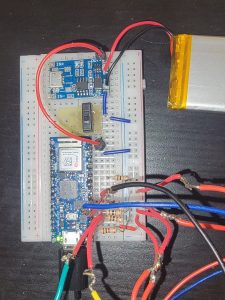
Back of circuit boardFront of circuit board
Good news: with some fancy underneath and on-top wiring what we currently have is working perfectly.
Bad news: The TP-4056 Lithium Battery Charger is on hold for another week so we’re still not wireless as ECHO is dependent on being connected to my laptop for power and to send data (both things I’m planning to resolve ASAP).
Sensors
With the female JST connectors on my circuit board, it was time to solder up my flex bend sensor, shorten the wires of my existing FSRs, and attach them all to male JST connectors. By using JST connectors instead of soldering them directly to the circuit board like in my previous prototypes, this will allow easier and more protective storage/transportation of ECHO, but will also allow me to easily swap out a sensor with a backup if needed.
3D Printing
This time around, I’m starting to feel like a pro with the 3D printer (or maybe I just learned to measure twice before I print something). Regardless, with the circuit board around 75% completed, I finally have the measurements I need to begin designing a 3D-printed box that will clip onto my French horn.
Design Considerations:
The design should accommodate JST connectors, allowing them to exit the box.
The microcontroller’s LED should be visible to easily check its connection status.
Include holes for the antenna and a battery On/Off switch.
The design should have a slot for the microcontroller to plug in.
The device should be compact enough to clip onto a horn without interfering with valve or slide movement.
Ensure a secure fit for the Li-Po battery and circuit board to minimize the risk of damage.
The circuit board and battery should be easily removable for charging and repair purposes.
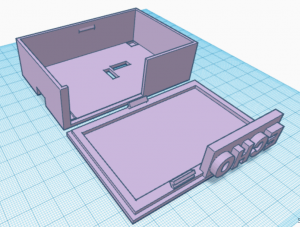
Design Solutions Implemented (so far):
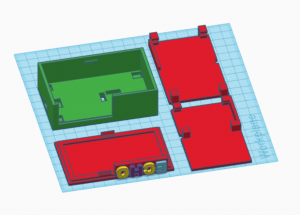
Designed shelf inserts inside the box with “arms” to securely hold the battery and circuit board in place.
The “arms” of the shelf holding the circuit board are designed to fit into specific holes in the box’s floor, preventing any sliding movement.
Latest box and inserts design
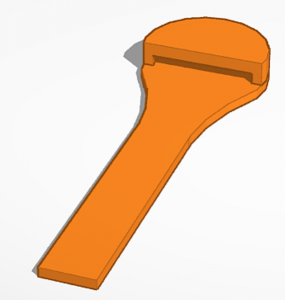
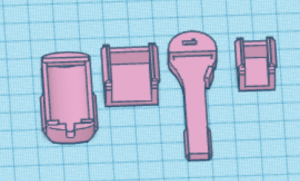
I’ve also started working on an update to my original key clip design which will include a snap-on cover to protect where the electrical wires are soldered to the FSRs after an unfortunate mishap I had this week breaking off the wires of my Li-Po battery.
Latest FSR clip prototype with clip-on cover
Final thoughts
Knock on wood, but by next week I hope to finalize my box design, finish up my circuit board, and edit my arduino code so that it can send data wirelessly to MaxMSP using UDP send/recieve.
Things are really starting to come together quickly, so here’s a quick overview of my progress this past week!
Flex Bend Sensor
Firstly, the flex bend sensor I ordered last week finally arrived. I integrated it into my prototype electronic circuit and updated the Arduino IDE code for testing. Once I solder wires to the sensor pins, my next step will be sewing a channel on a glove to secure it. I plan to sew the channel from the cuff towards the palm to measure the bend of my inner wrist.
IMU Module
Initially, I considered using an accelerometer attached to my wrist to track movement. However, the Arduino Nano 33 IoT comes with a built-in IMU module. Intrigued by its capabilities, I decided to incorporate it into my project. While the flex bend sensor is ideal for measuring the hand’s position in the bell (open, 1/2 stopped, closed), the IMU module offers a unique opportunity to track performance gestures such as bells up, cues, or general movement within the performance space.
To integrate the IMU module, I followed Arduino’s documentation. Although I could read the incoming data from my analog pins without issues, I encountered problems when trying to use analogRead() and IMU.readAcceleration simultaneously. After systematically commenting out sections of my code, I determined that both the analog pins and the IMU module functioned correctly separately. A bit of research led me to discover that the Arduino_LSM6DS3 library uses I2C via pins A4 and A5 to communicate with the IMU module. By simply relocating my flex bend sensor from A4 to A6, everything started working smoothly!
Circuit Board
Additionally, Dr. Bob introduced me to Fritzing, an electronics and
Prototype board that I built using Fritzing
prototyping software. This helped me streamline my previous prototype circuit and devise a solution for integrating the TP-4056 Lithium Battery Charger and Protection Module, along with a switch. This setup allows my microcontroller to operate on a LiPo battery during performances, eliminating the need for a wired power source.
The transformation of my prototype electronic circuit board is remarkable! It’s becoming so much simpler. In fact, it might soon transition from a prototype to a final design. To organize the multiple components and wiring for ECHO’s final version, I plan to use Adafruit’s Perma-Proto 1/2 sized breadboard. Additionally, a smaller breadboard will be positioned underneath to accommodate JST connectors. This setup will enable me to easily attach and detach my sensors for storage and replacement, should any get damaged.
Onwards!
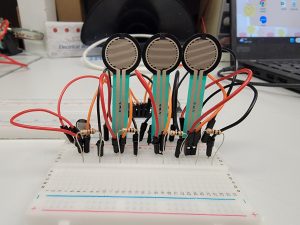
Prototype board from February, using two breadboards and only three sensorsMost up-to-date prototype, on one 1/2 sized breadboard with the addition of 5 sensors, a switch, and a battery charging module
A: Because they knew they could make an electrifying work together!
During UBC’s Bang! Festival on April 14th, I will be giving a capstone presentation and demonstration at 2pm to showcase how ECHO can be utilized to control various audio/video/lighting processes. In preparation for this event, I reached out to artist Randy McCormick to explore the possibility of collaborating and creating artwork that I could manipulate using Jitter in Max. For one of the pieces, which was painted on glass, I’m also considering experimenting with DMX lighting, mirrors, and projections through the artwork itself.
After numerous phone calls and messages, I’m thrilled to announce that I’ve received the finished works from Randy. Stay tuned for further details as I delve into experimenting with different methods of manipulating these artworks!
Onwards!
Me standing next to artist Randy McCormick holding the two aforementioned works.
A: Because it had a virus and needed a byte of medicine!
In all seriousness though, my laptop is no longer functioning properly and will be sent in for a check-up despite my troubleshooting efforts this week. Consequently, software development had to take a backseat, which wasn’t what I originally planned.
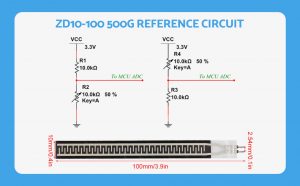
On a brighter note, I’ve made progress in finding a solution for tracking the player’s hand position in the bell! After considering various options such as accelerometers, accelerometer/gyroscope combos, stretch sensors, pressure sensors, or utilizing the built-in sensors of a smartphone or smartwatch, I’ve decided to order a flex sensor. This type of sensor measures the amount it bends or deflects, making it ideal for detecting the nuanced movements involved in hand-stopping.
I chose the flex sensor because I wanted to pay homage to one of the distinctive aspects of classical horn playing: hand-stopping. Traditionally, hand-stopping was used to play diatonically/chromatically on the natural horn. Therefore, it was crucial to find a sensor capable of capturing the different degrees of hand-stopping. The flex sensor will be positioned on the inner wrist, possibly integrated into a glove of some sort, to accurately measure the bend of the wrist as it transitions from an open to a stopped position.
Behold the latest addition: ECHO! The Arduino is finally connected to the sensors which are seamlessly adhered to the key clips and attached to my horn. As such, it’s time to take a bit of a pause on hardware (don’t worry, the accelerometer is still in my near-future plans) and focus on expanding my match patch further to start to include the control things like effects plugins and recording.
…and all through the lab, not a student was sleeping, not even a dab.
Because the plan is by the end of this upcoming week, my FSRs will be mounted to the key clips I oh-so-lovingly designed a few weeks ago and I’ll be able to view incoming data while playing horn for the first time instead of through stimulations.
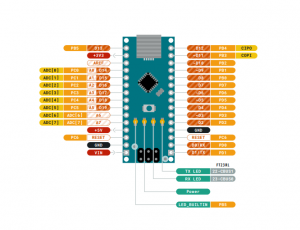
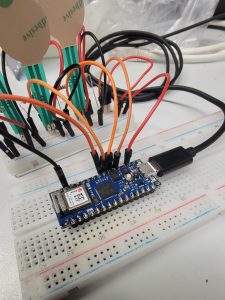
Before that though, it was time to finally “break out the good stuff” this week. In preparation, I put my new-found soldering skills to use by soldering the pins to my Arduino Nano 33 IoT. Unlike the Arduino Uno which I have been using for the past two weeks to prototype electric circuits, the Nano has Wi-Fi and Bluetooth connectivity making it wireless.
Nano attached to test circuitArduino Nano 33 IoT Pinout
Luckily for me, arduino.cc has a great tutorial onconnecting the Nano 33 IoT to a Wi-Fi Network. A cool feature of this tutorial is that it uses the built-in LED on the Arduino to tell you the strength of your Wi-Fi connection, which will be helpful later for performers when using ECHO. Especially on stage where they might move accidentally out of range of the router. The quicker the LED blinks, the stronger the connection is.
Current prototype electronic circuit
Also this week, I got to unpackage the shiny, beautiful, and new FSRs that will be mounted to the key clips. When I first started prototyping my electric circuits, I had only set up 3 FSRs so I expanded both my circuit and my existing code to include the 4th mini sensor which will be used for the thumb trigger.
Despite encountering some initial hiccups with Arduino2Max, where it failed to detect the connection between the Nano and my computer, I was eventually able to receive incoming data from all four FSRs and the Nano after troubleshooting.
Two weeks ago I refreshed my (basic) knowledge of circuits and with the help of Dr. Bob Pritchard, I learned how to use a breadboard to create prototypes of electronic circuits and how to use Arduino IDE to write and upload code to a microcontroller. Instead of using the Arduino Nano 33 IoT which will be used in the final product, I set up a prototype electronic circuit using three spare FSRs and an Arduino Uno and was able to successfully read data from all three sensors thanks to Arduino IDE. This past week, using Arduino2Max is was able to start experimenting with how the FSR data could be used within Max to trigger samples and control plugins.
Watch the second video for a very simple demonstration of one way the incoming data from the FSRs could be used to trigger samples.
A saga, or, as defined by Oxford Languages, a long, involved story, account, or series of incidents. My experience with 3D printing can accurately be summarized as a long series of incidents, although the incidents are what allowed some interesting discoveries along the way.
One of the primary ways I plan to augment my horn as part of ECHO is by adding force-sensitive resistors (FSRs) to the keys of my horn. This will allow me to track the amount of pressure applied to my keys. An additional goal I had for this project was to ensure that any augmentations I made to my horn could be easily (and safely) applied and removed. To be able to apply/remove the FSRs I’ve tested several different key clip designs over the past two weeks.
The horn that I am building ECHO to augment is a double horn and has four different keys. 3 identical keys which I will refer to as finger keys and the thumb trigger used to switch between the F and Bb side of the horn which I will refer to as the thumb key. Because of this, I needed to design two different key clip designs for the two different types of keys.
Finger Keys
During the development of the key clip for the finger keys, I created 10 prototypes. Initially, I made a paper template for the key shape, measured its dimensions with a caliper, and designed the first prototype in Tinkercad as a teardrop shape. However, I realized the FSR tail needed support, so I based the key clip shape on the FSR, not my finger keys.
The next 5 prototypes involved adjusting the tapering of the key clip head into the tail and modifying the cap’s depth and wall thickness. The smallest wall thickness achievable with the filament was 1.5mm. Printing without supports led to cap sagging, so I increased the cavity depth to 4mm from 2mm. This allowed secure attachment to the finger key, but the tail could move slightly out of alignment. To fix this, I created 3 more designs creating different small clips as a stopper until I found one I was happy with.
After finalizing the design, I discovered a new issue: misaligned finger keys on the horn. The middle key slanted upwards, causing the key clips to rub against each other during performance. To solve this, I printed new key clips with numbers on the caps and used a Dremel to sand the friction points until they no longer touched, ensuring smooth performance.
Paper template, #1, #2, #3, #4, #6, #7, #8, #10
Thumb Key
The thumb key clip required significantly more tinkering during development due to several unique challenges when compared to the finger key clip: the tight space it’s situated in, its convex shape, and the brace it’s attached to. Throughout developing the thumb key clip I created 17 prototypes before landing on my final design.
For my first design, I very carefully measured and calculated the curvature of the convex shape and created a design with two clips on one side as I knew there wasn’t enough room between the thumb trigger and my lead pipe to slide the clip head on like I did with the finger key clips. However, this approach didn’t work due to miscalculations. Removing the clips, the next 6 prototypes focused on adjusting the design to rest flush on the top of the thumb trigger.
Once satisfied with the fit, I once again addressed securing the clip to the key. The following two prototypes introduced a snap bottom, but it was challenging to apply and remove. I modified it into a sliding bottom through 6 more prototypes, ensuring a secure fit during performance while being easy to slide out.
I discovered then that the sliding bottom wasn’t securing the key clip but the track it slid into. Cutting the design in half below the track proved to maintain it’s security. However, the rectangular edge was uncomfortable and hit against my leadpipe. Two more designs rounded the edges, creating an organic shape while preserving flat space for the FSR.
Paper template, #1, #2, #4, #5, #6, #7, #8, #9, #10, #11, #12, #13, #14 (from left to right, prototypes on bottom three rows comprise of 1 box and 1 lid)
Who knew 3D printing could be so frustrating? Probably a lot of people other than me.
Week 2 of the ECHO project has been spent creating several prototypes of the clips that will eventually attach the FSR sensors to the keys of my horn.
Last week, I started this process by making paper templates of the shape and size of my keys. I then copied these templates onto an additional piece of paper to make precise measurements using a slide caliper. After getting measurements of all the dimensions I needed, I then worked on creating several 3D digital design prototypes of the 3 identical clips for the keys controlled by the player’s index, middle, and ring finger. With each prototype design, I then used PrusaSlicer to generate the G-code needed for the 3D printer.
After this process, I’ve been able to create a design that is the perfect size for the FSR sensors I will be using, but I am still adjusting the cap so that it will securely stay on and won’t over-crowd the other keys. I was also able to create an initial prototype for the thumb key, though designing a clip for this key has proven to be a unique challenge when compared to the other keys as it is convex instead of flat and has some welded supports I will have to design around.
Onwards!
Finger Key Prototype #3Photo of First 4 Finger Key Prototypes in Order, Followed by an FSR SensorDigital Design of Finger Key Prototype #5 Created Using Tinkercad





 Because the plan is by the end of this upcoming week, my FSRs will be mounted to the key clips I oh-so-lovingly designed a few weeks ago and I’ll be able to view incoming data while playing horn for the first time instead of through stimulations.
Because the plan is by the end of this upcoming week, my FSRs will be mounted to the key clips I oh-so-lovingly designed a few weeks ago and I’ll be able to view incoming data while playing horn for the first time instead of through stimulations.