By Bryn Martin
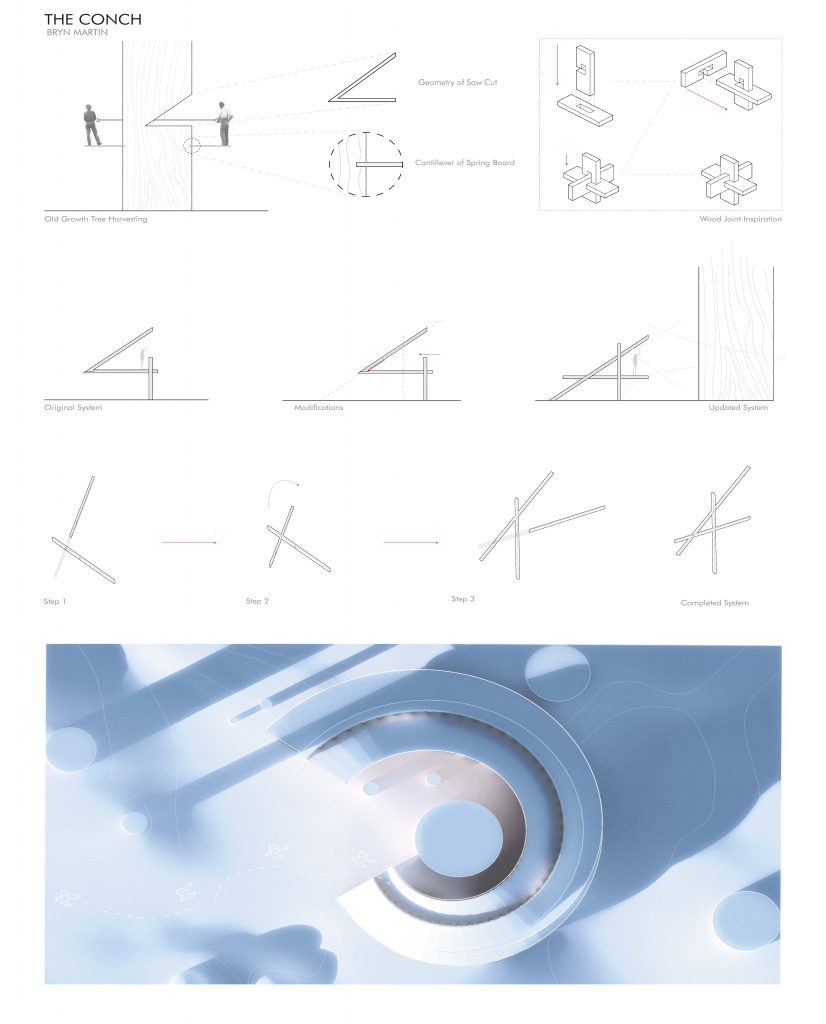
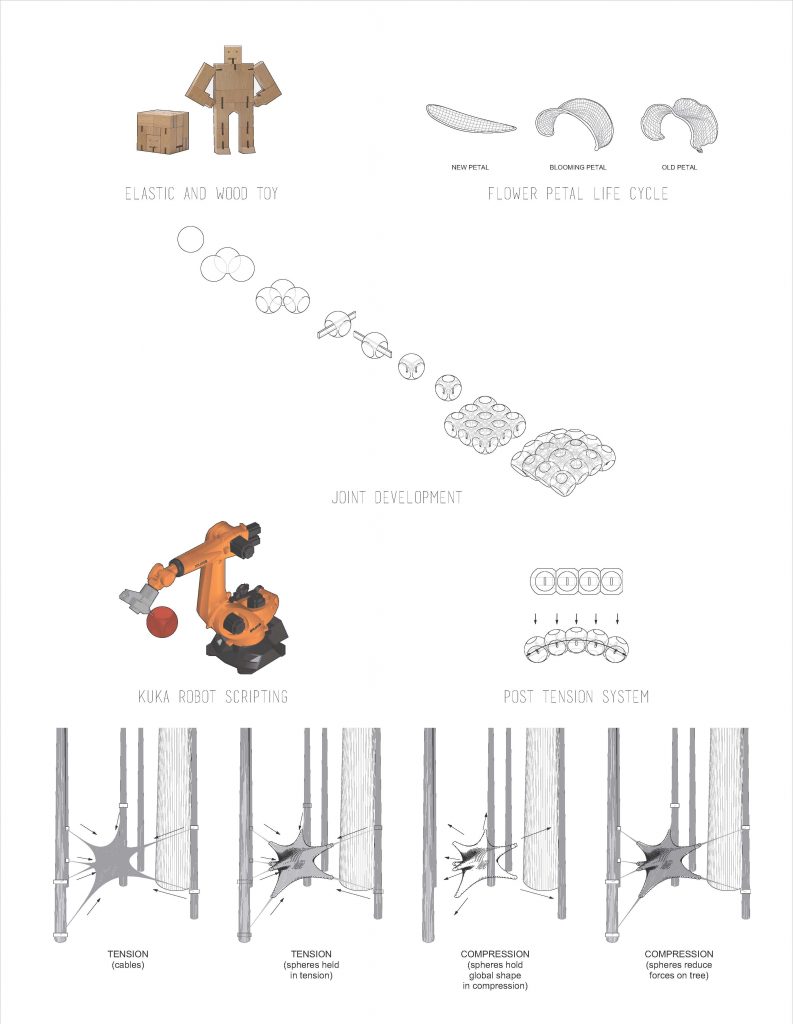
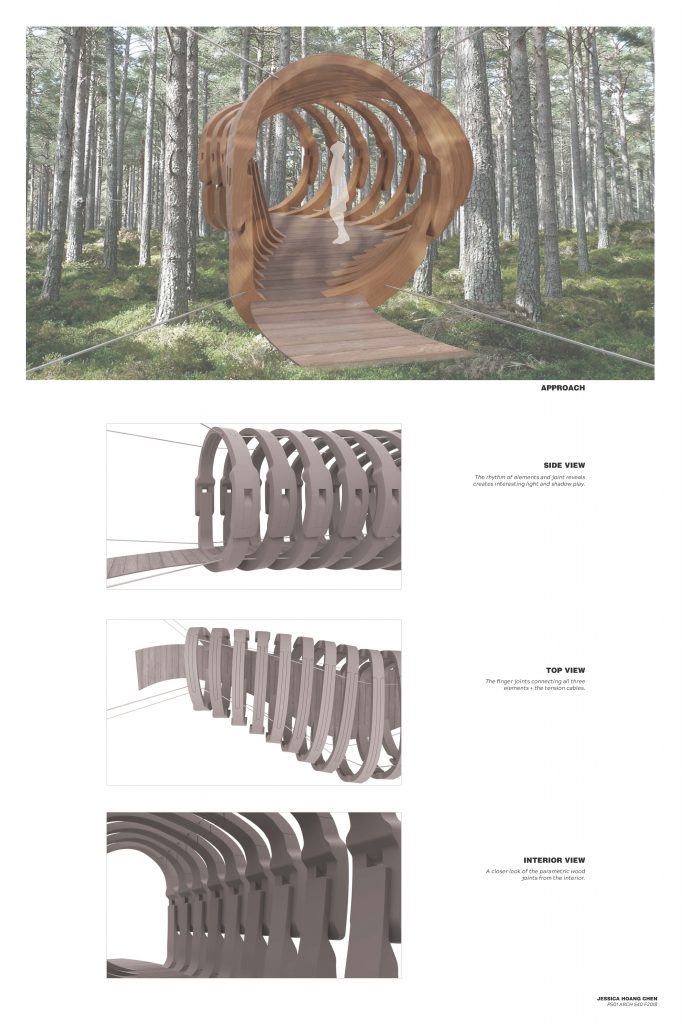
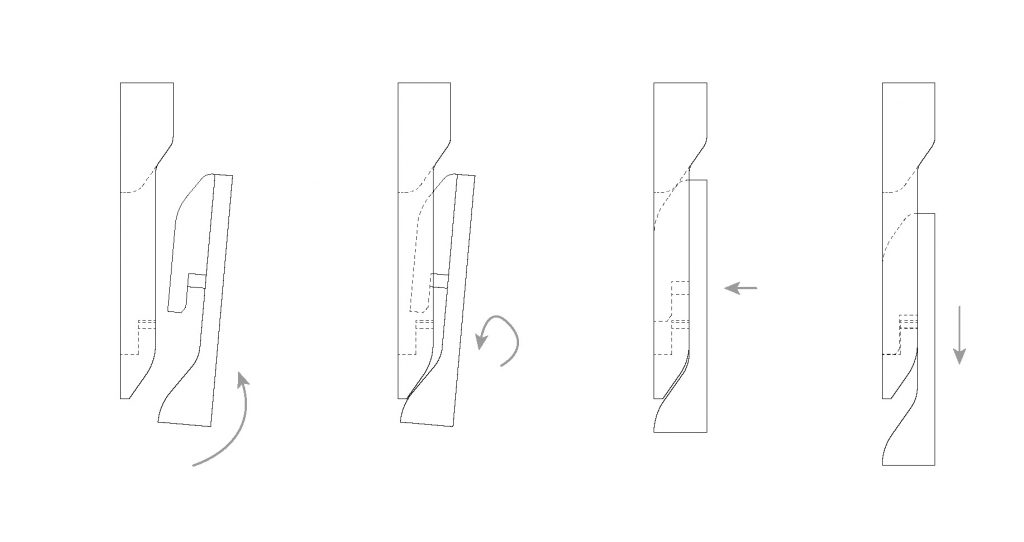
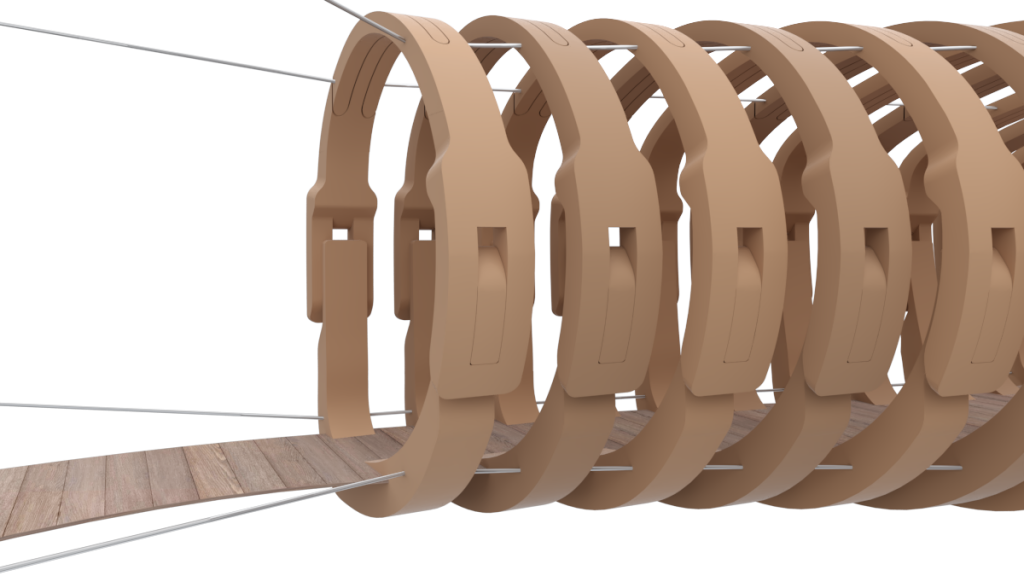
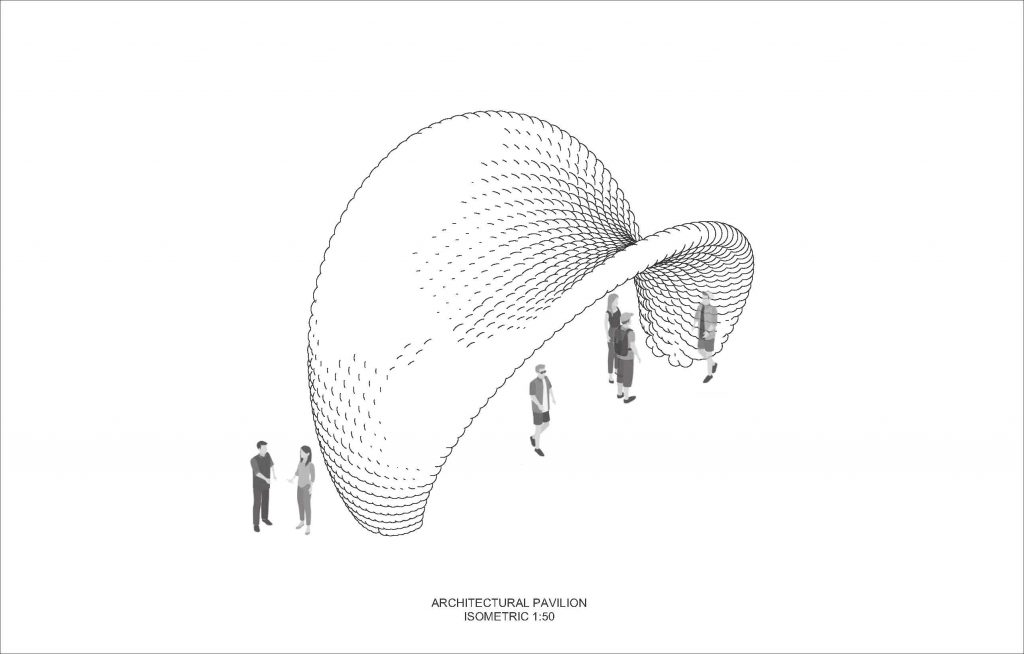
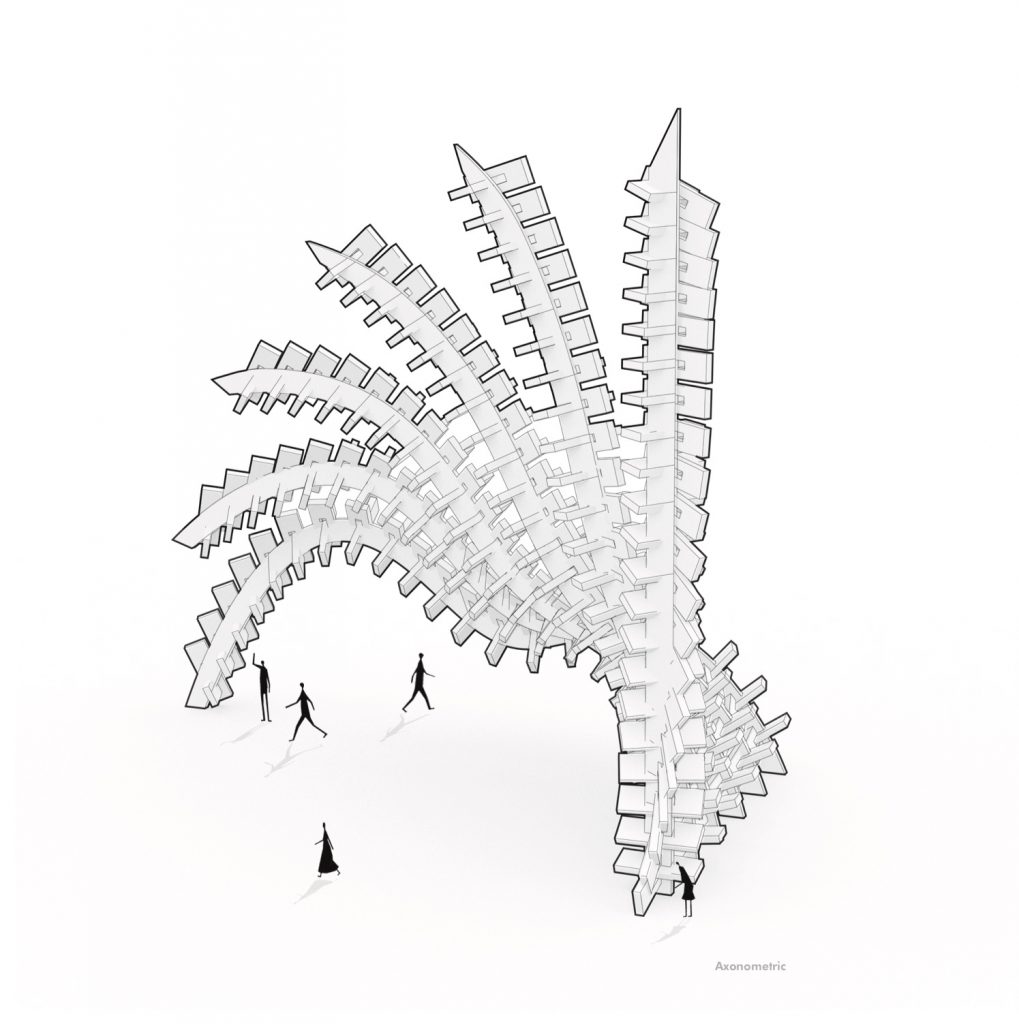
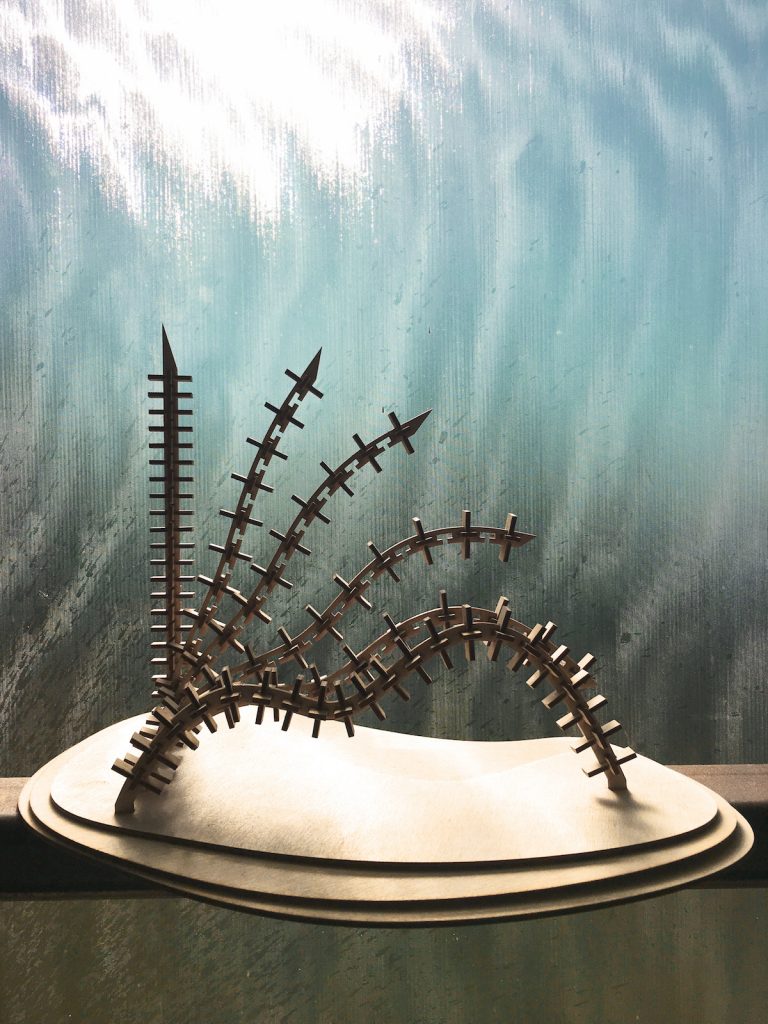
The Conch is a tree viewing shelter inspired by traditional old-growth tree logging practices and the geometry created by the process itself. Two elements were extracted from the process to create the geometrical framework for this design; First, the use of the ‘spring board’ which were wedged into a notch in the tree to create a cantilevered member in which the loggers could stand on to cut the tree down. And secondly, the V-shaped geometry of the cut which created an informal cavity space which one could occupy.
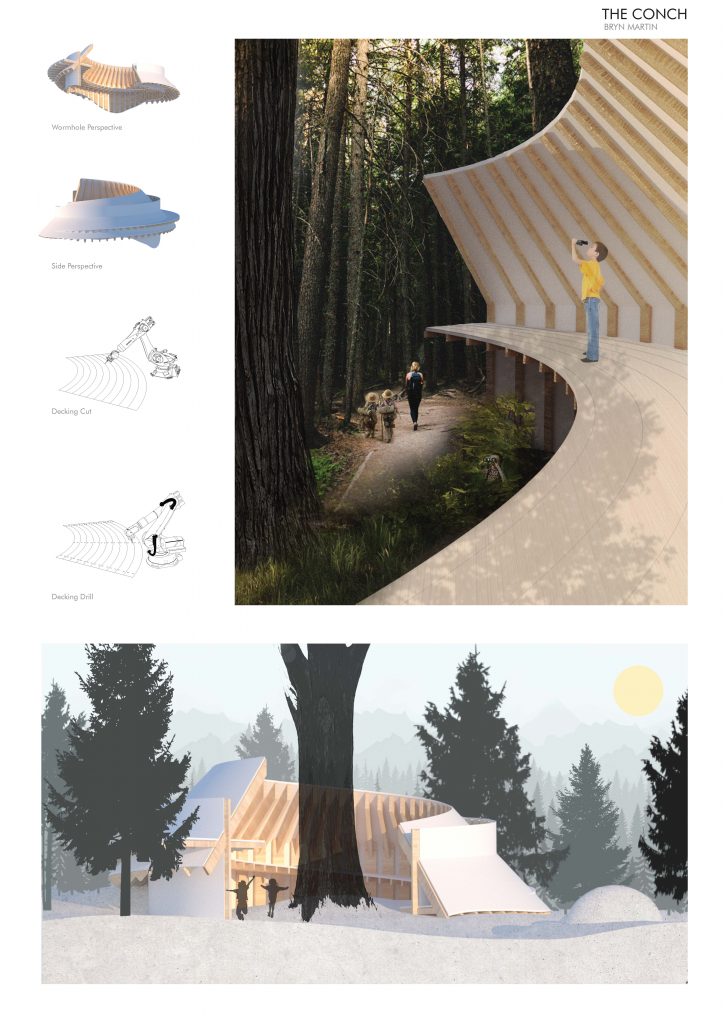
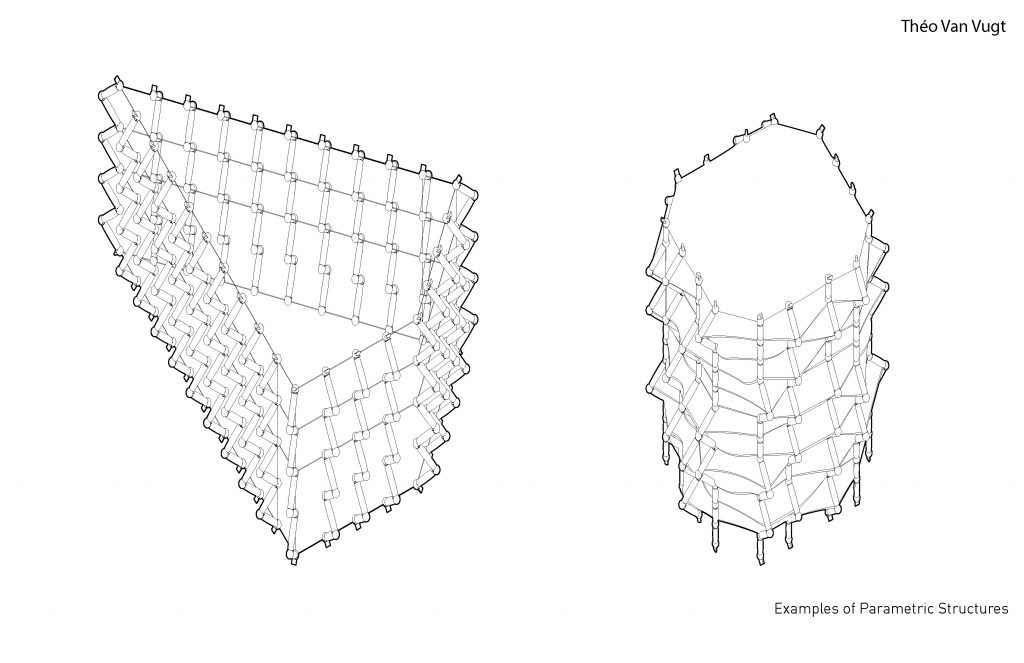
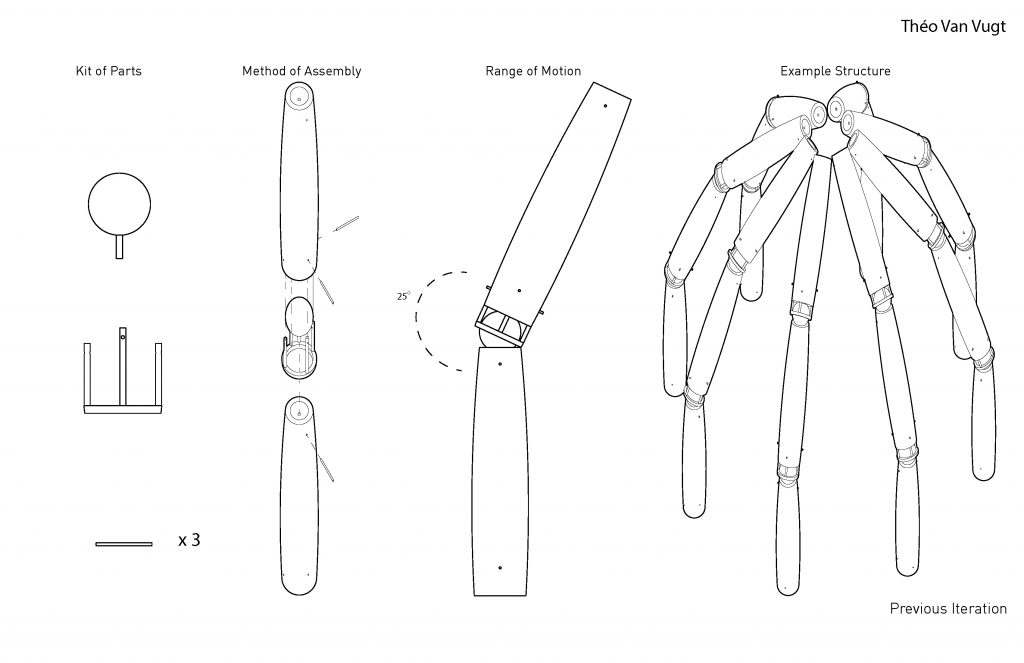
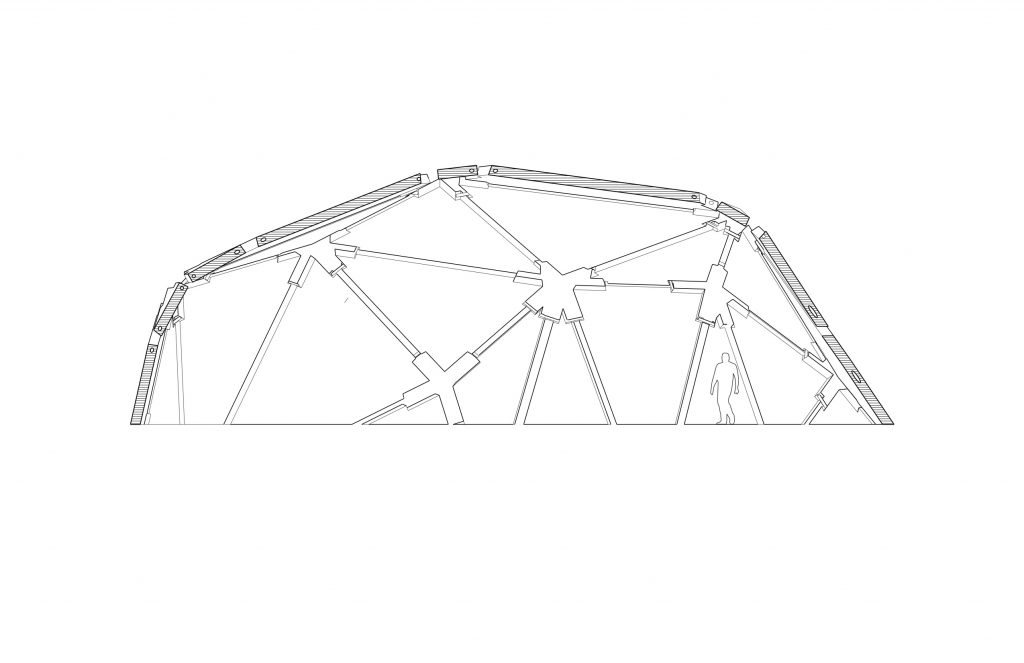
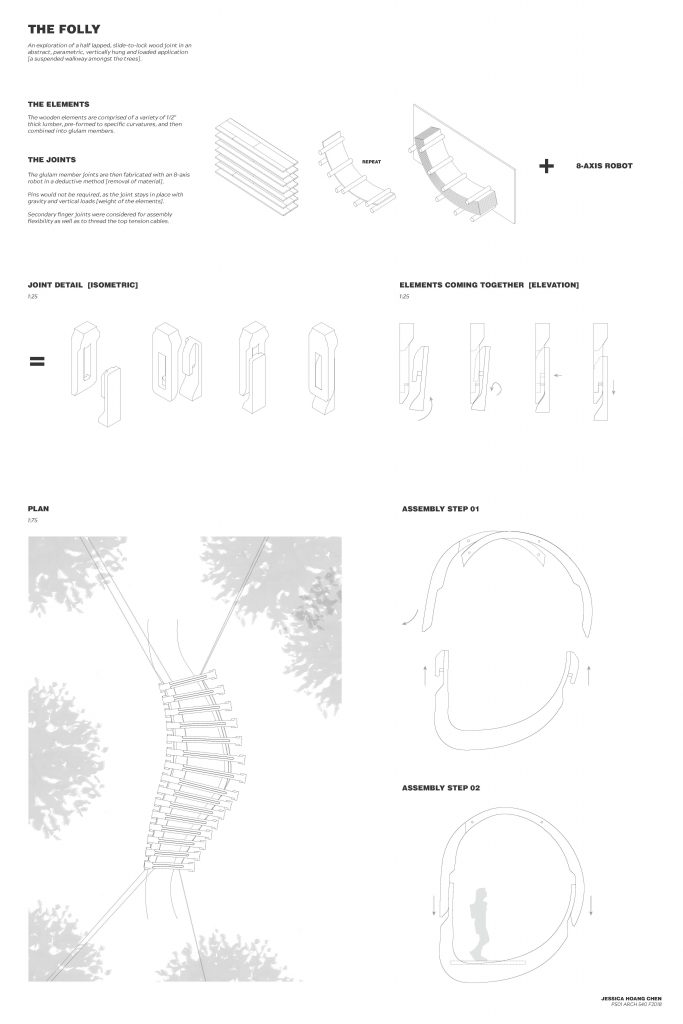
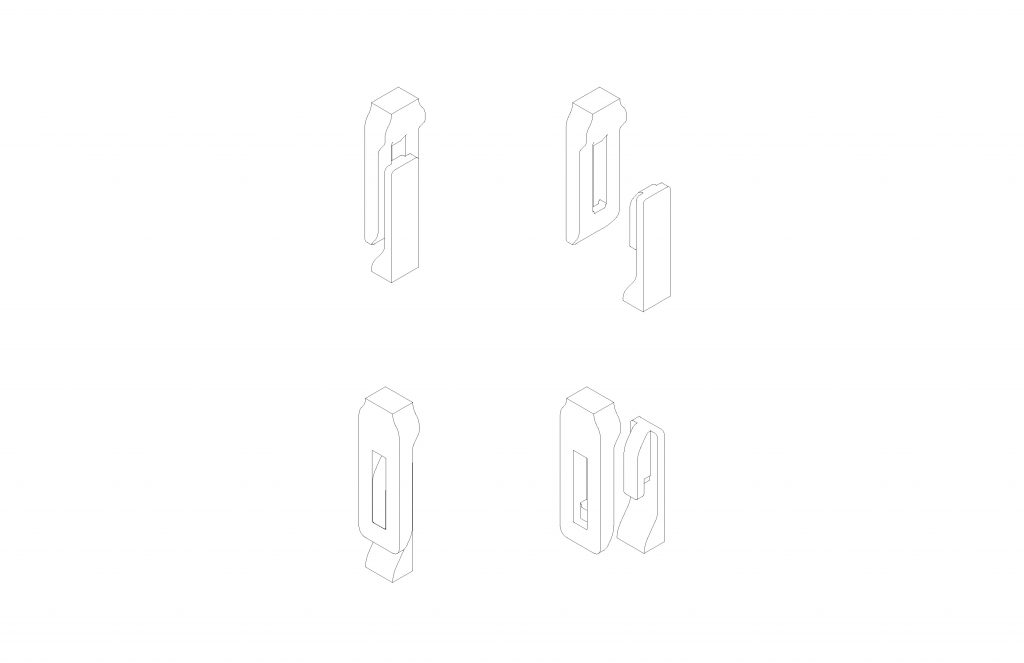
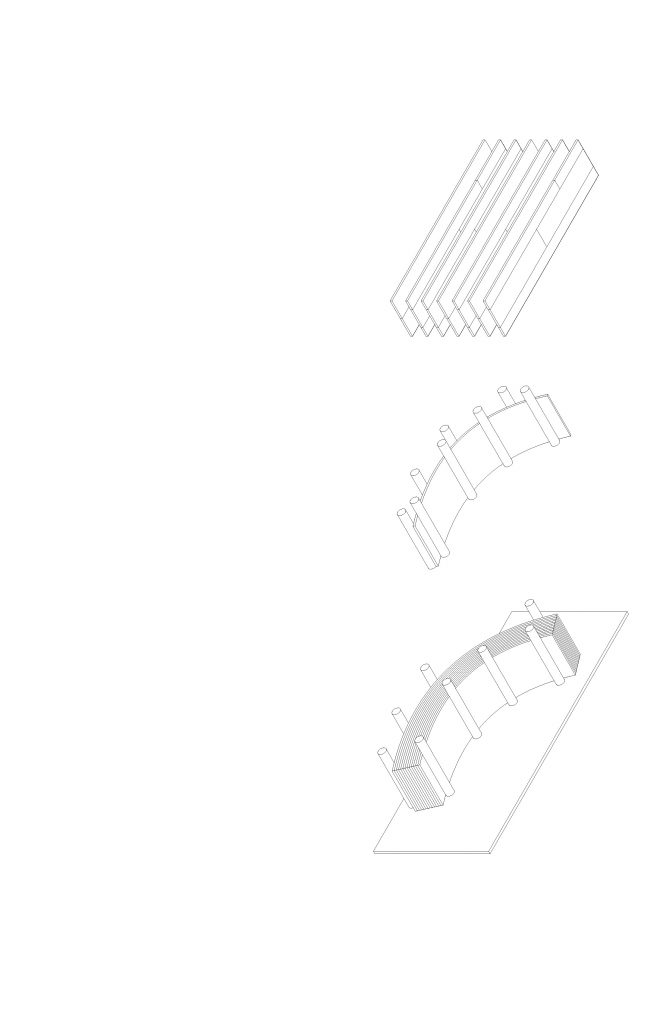
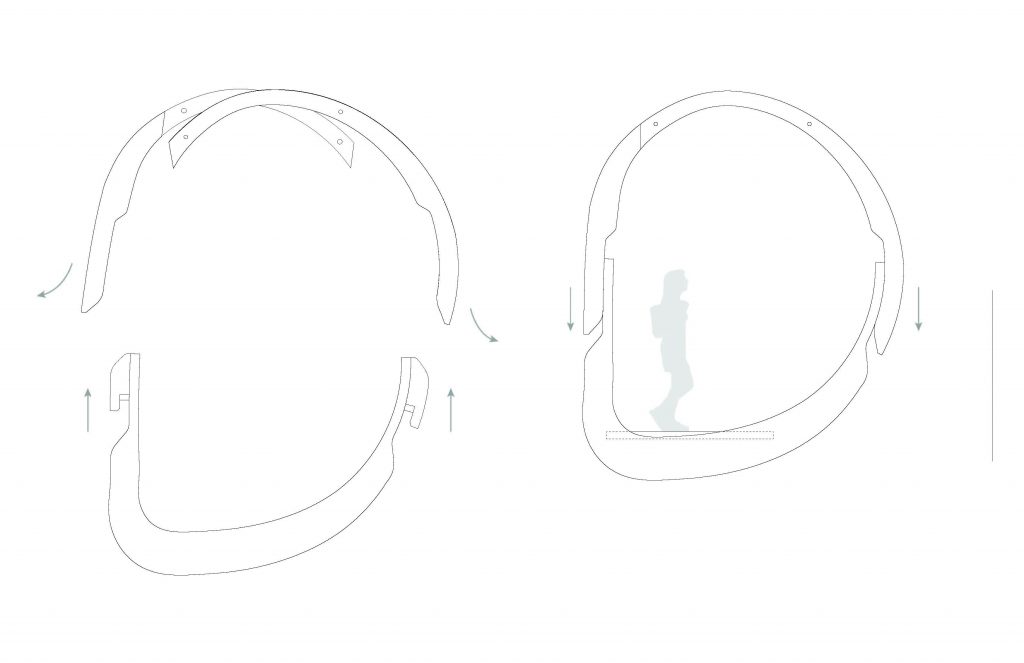
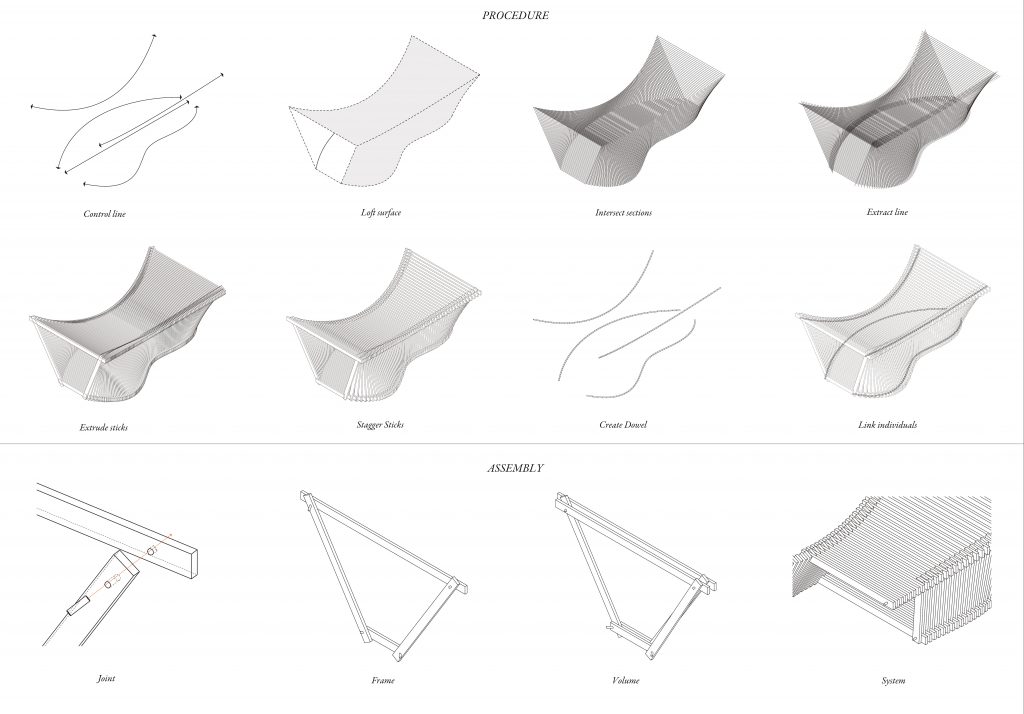
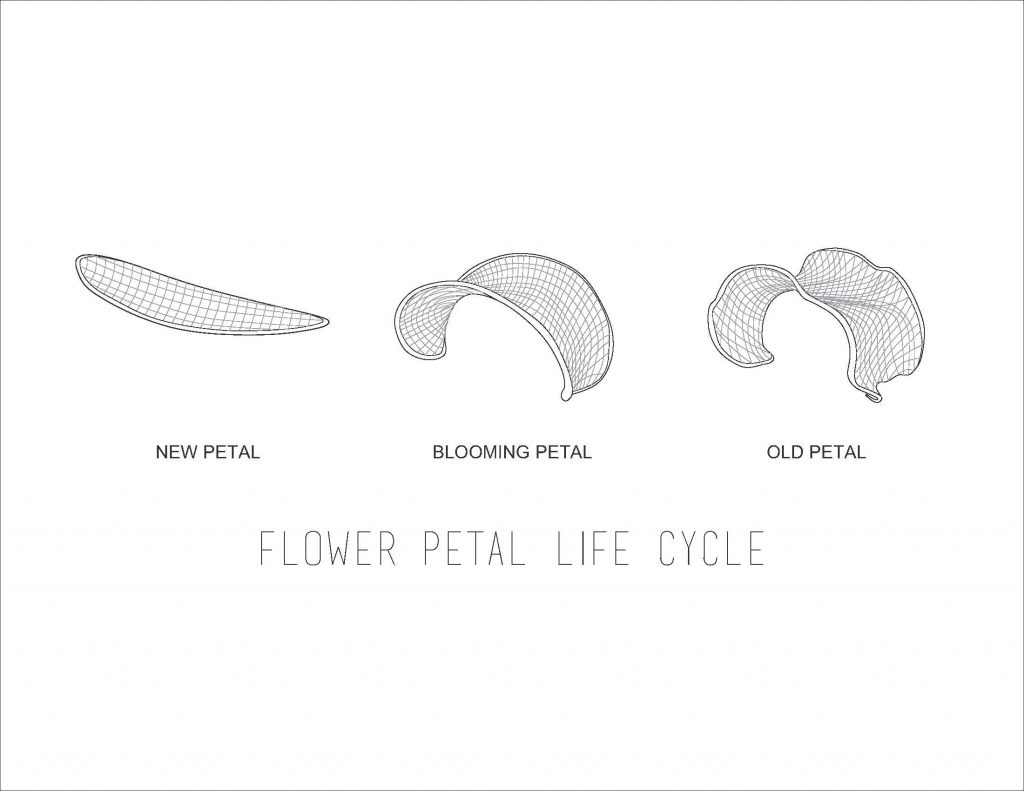
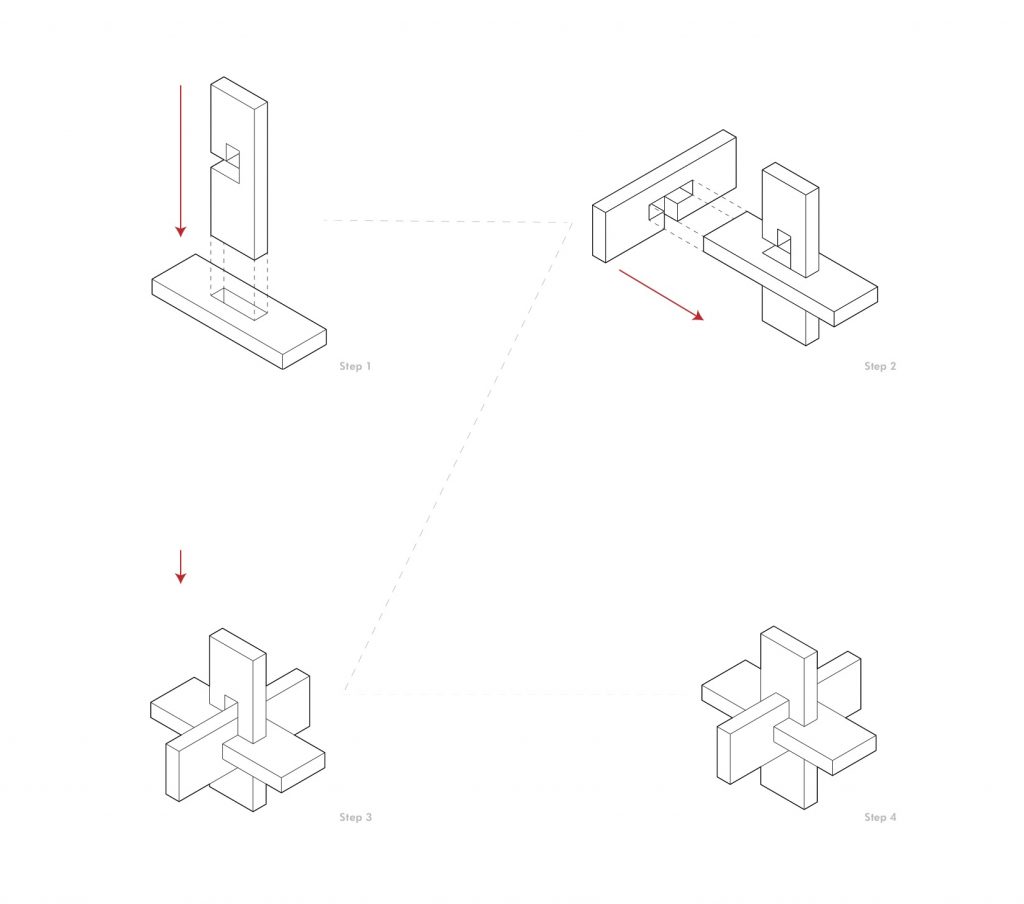
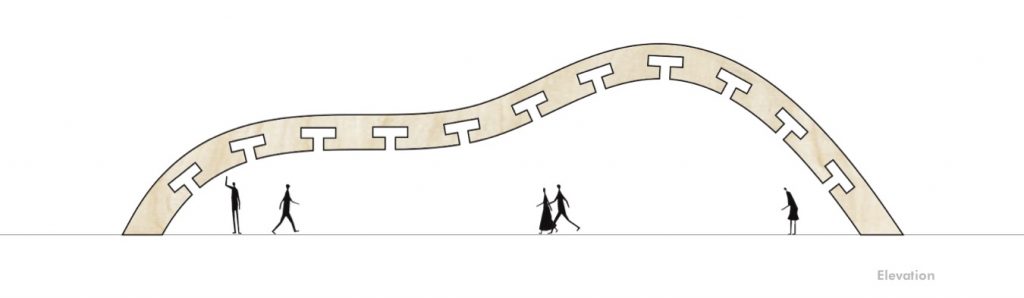
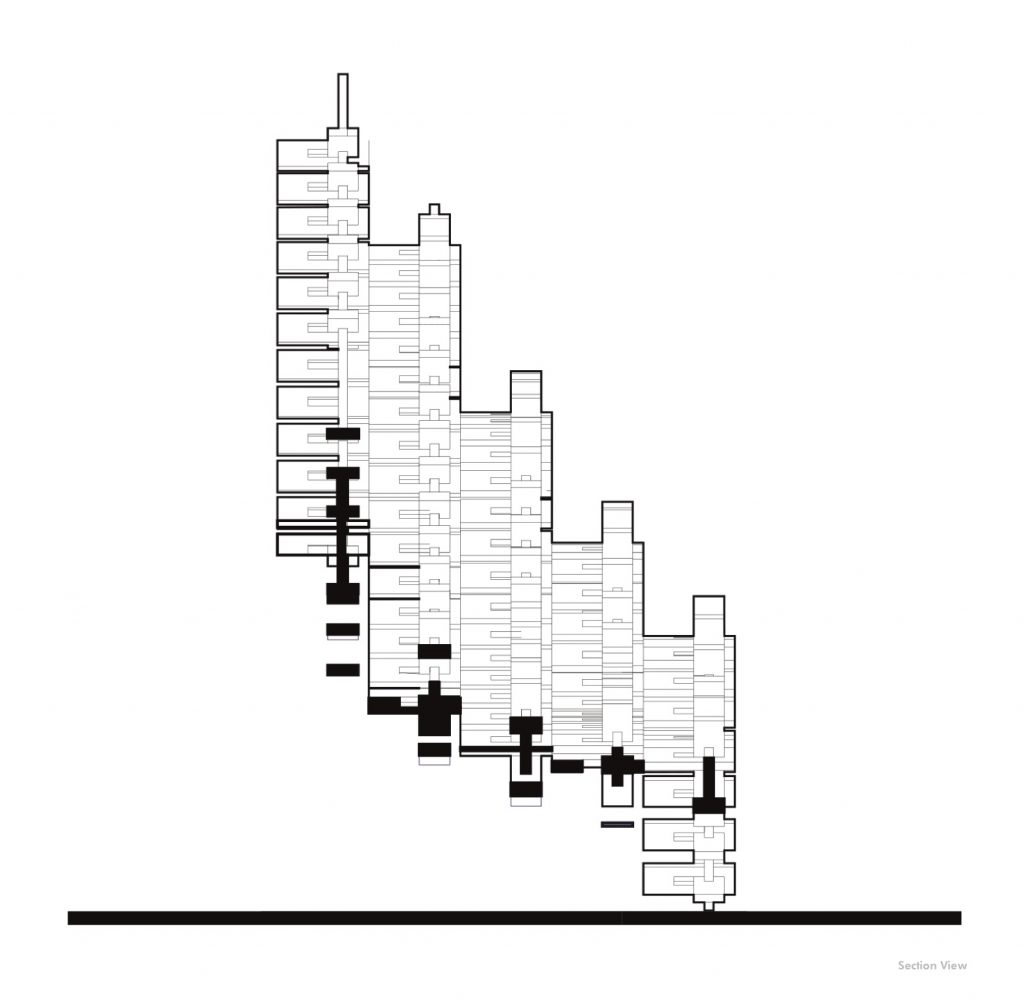
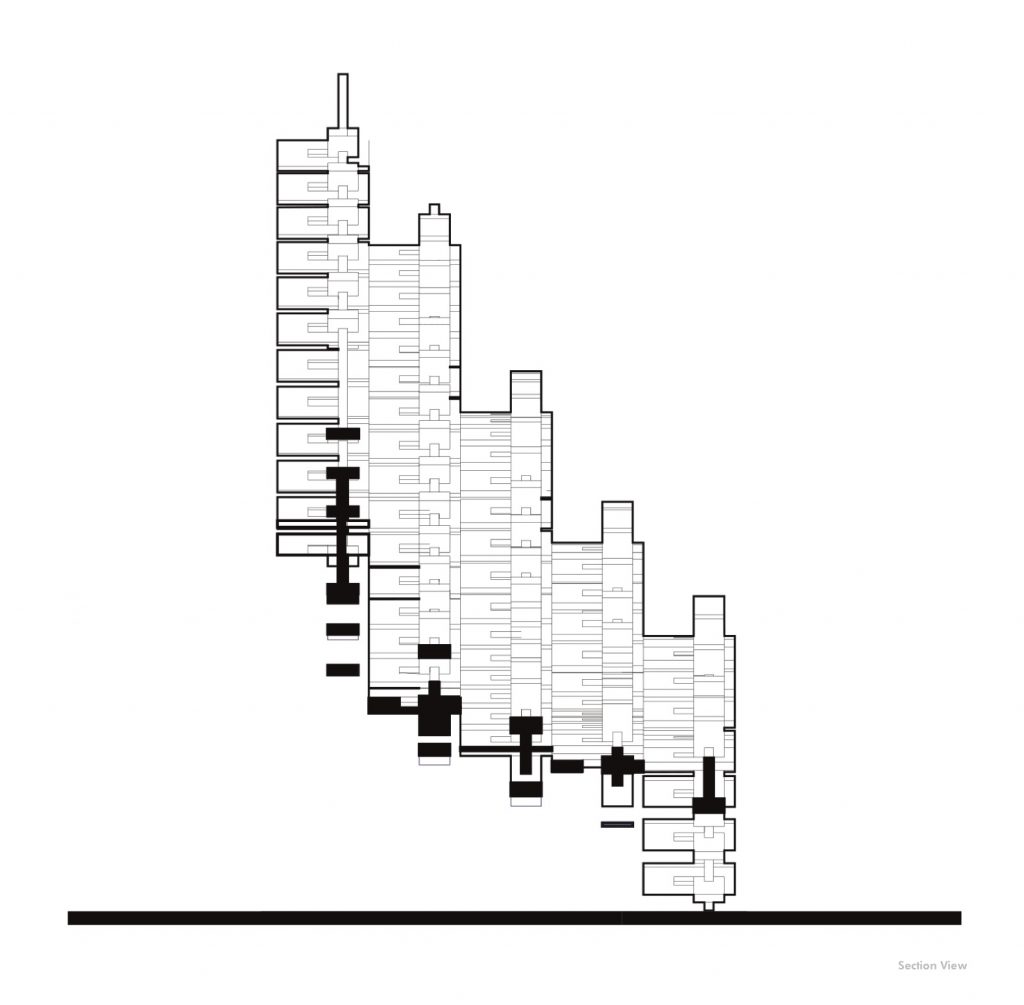
The wood joint from the previous ‘folly’ assignment was then adapted to create an occupiable space akin to the geometry of the V-cut and a cantilevered ramp that spirals upward around the base of the tree itself. The spiral was created from the parametric component of the golden ratio to create a conch-like form that appears to be naturally derived. The occupiable space becomes a place for sharing ideas, storytelling, and teaching for the Evan’s Lake Forest Education Society and an informal play-structure for visiting kids as they explore the forested area.
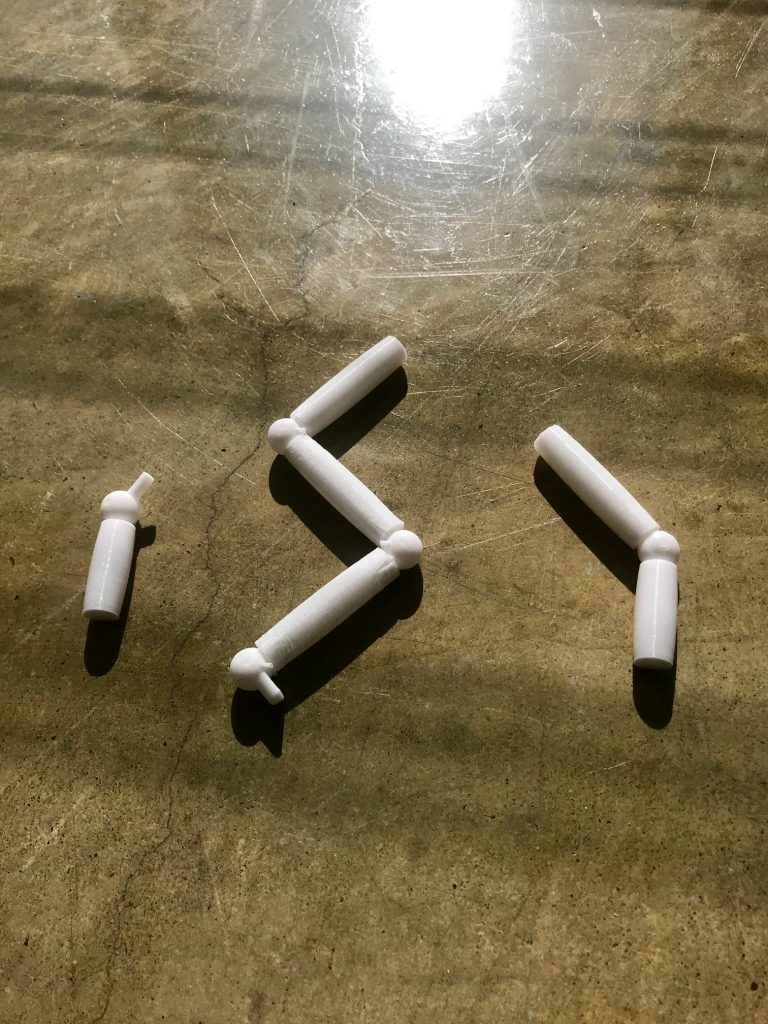
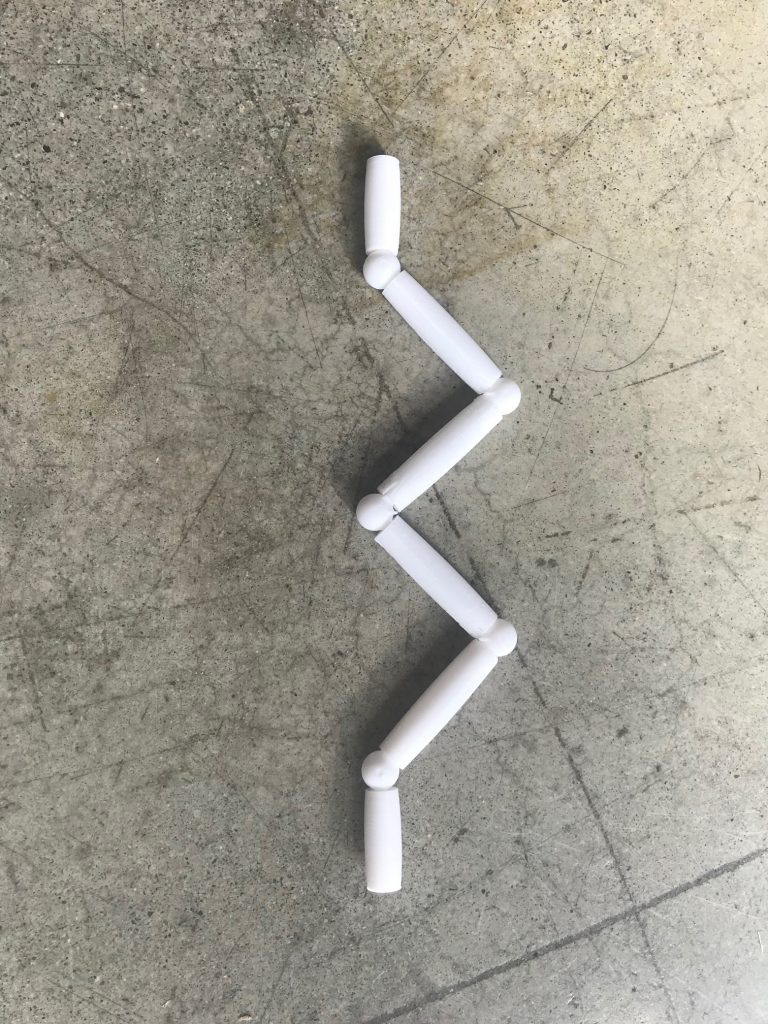
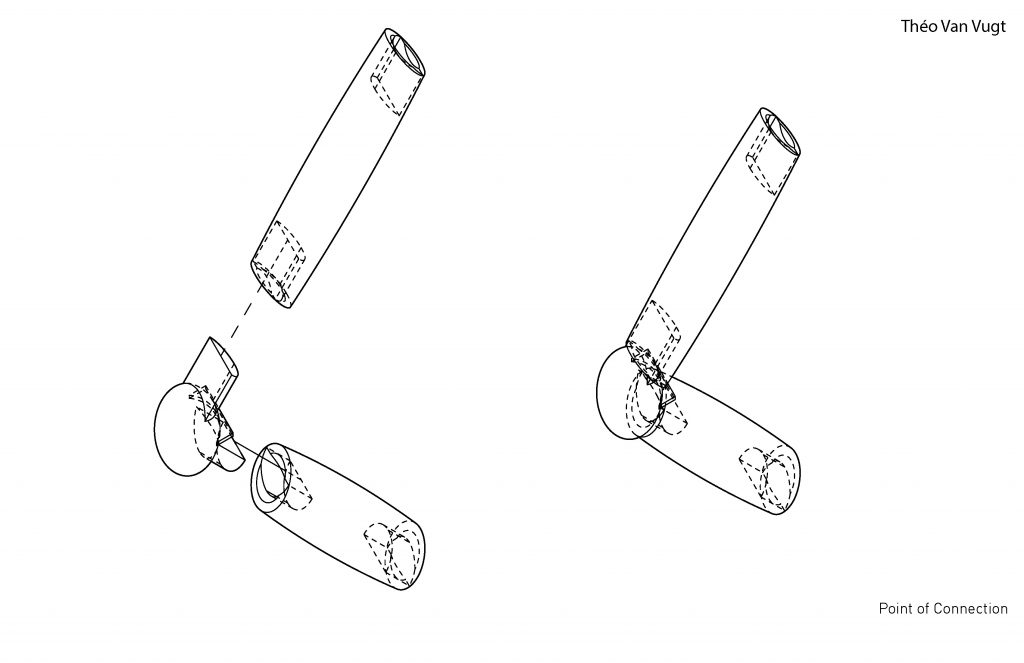
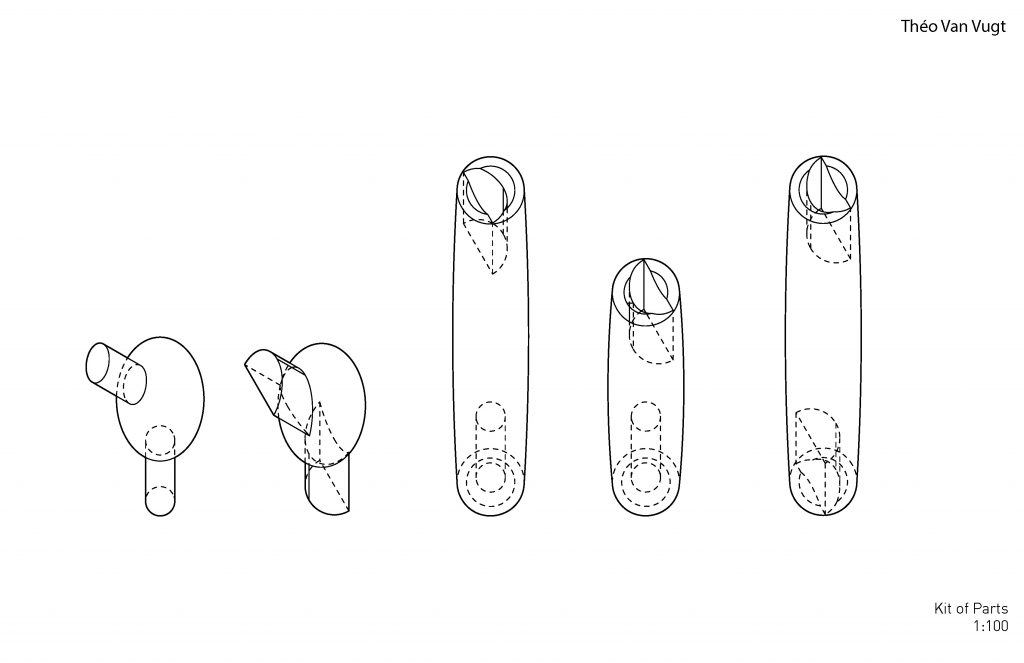
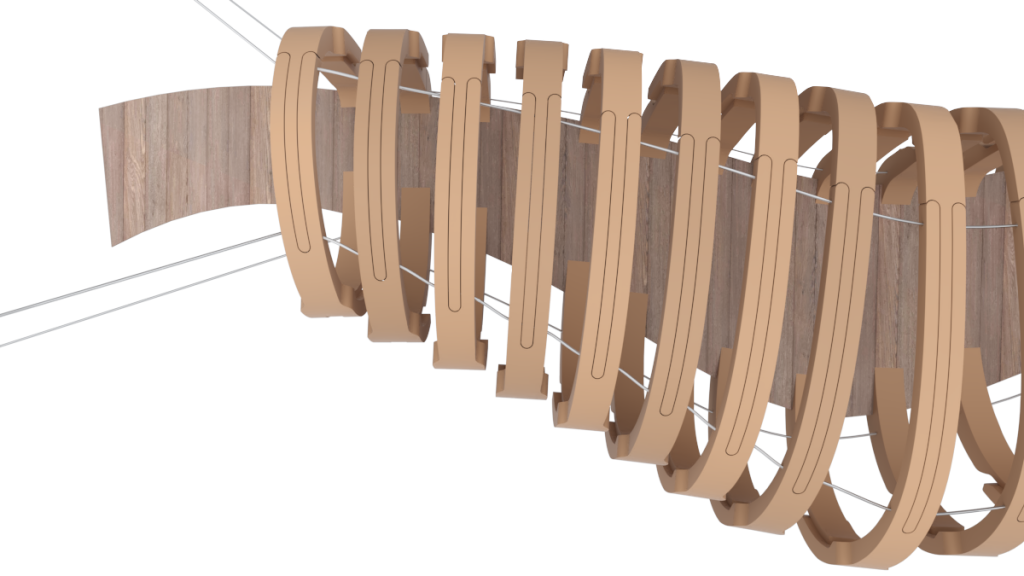
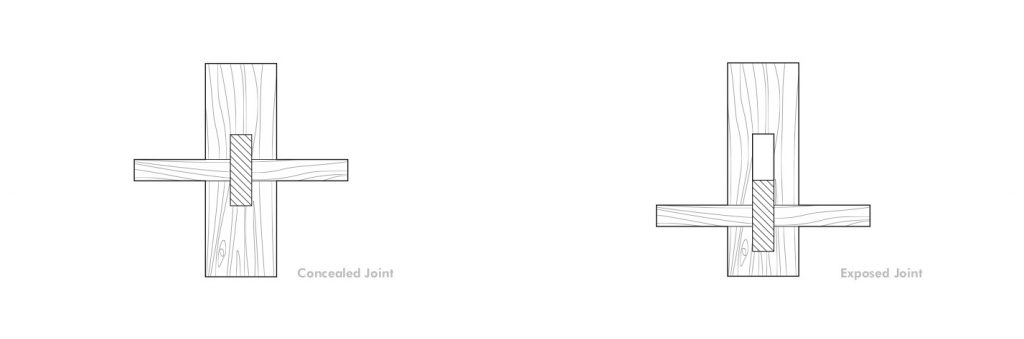
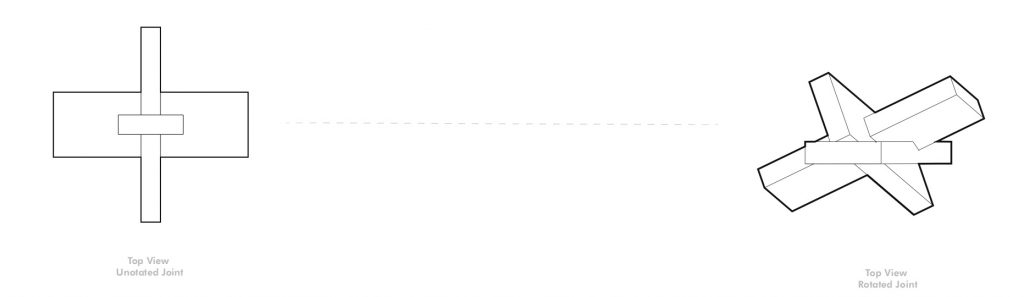
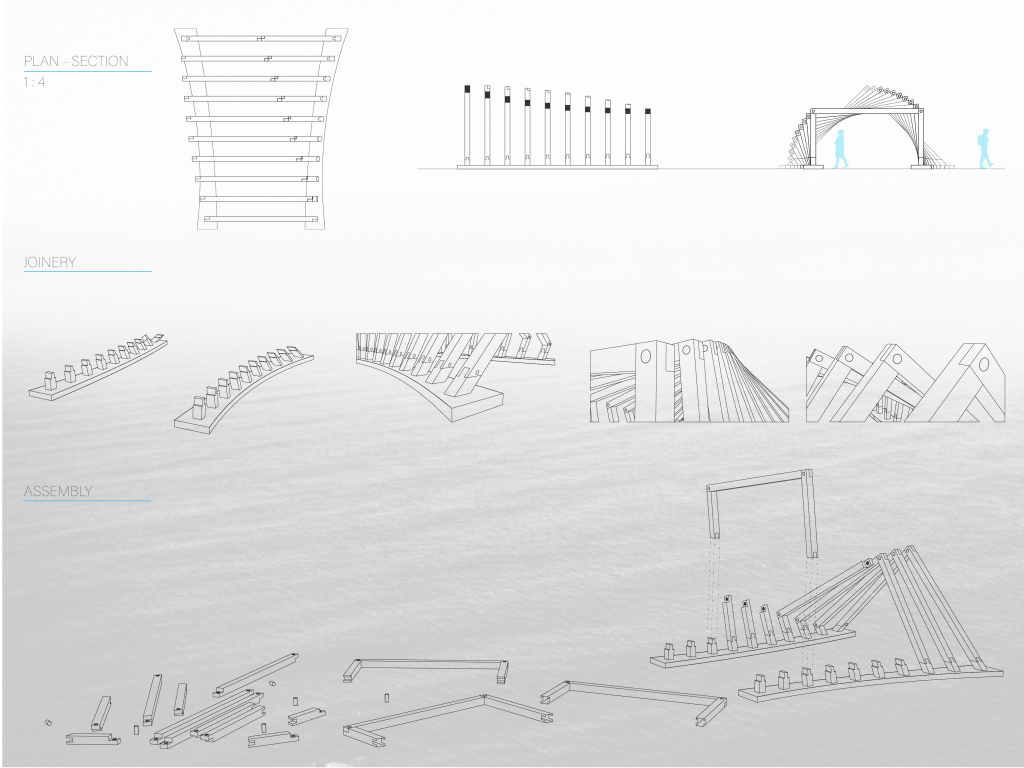
The entire structure can be constructed using dimensional lumber and plywood sheathing. With the aid of a KUKA Robot complex three-dimensional joints can be cut such that the main structural elements can be constructed with a series of wooden through-joints. The arrayed structural profiles are then tied together by the sheathing and the spiral decking which is secured to the cantilevered joist members.