So, hypothetically when I do extract RR from pulseOx (maybe I need to do that first, before even considering this question), how do I know what I’m measuring is right?
This question led me to ask which other methods of measuring RR could I use to increase confidence in my estimate. The simplest way is to keep count. This quickly gets irritating. The other way is to use capnography (yuuge setup and cost). Impedance capnography needs electrodes. Theoretically, I could look at the phrenic nerve/diaphragm – but there’s no practical way. IMU measurement of chest motion (which the BEST team uses for the respiratory rate). Can be used to get a decent estimate of BPM (breaths per minute).
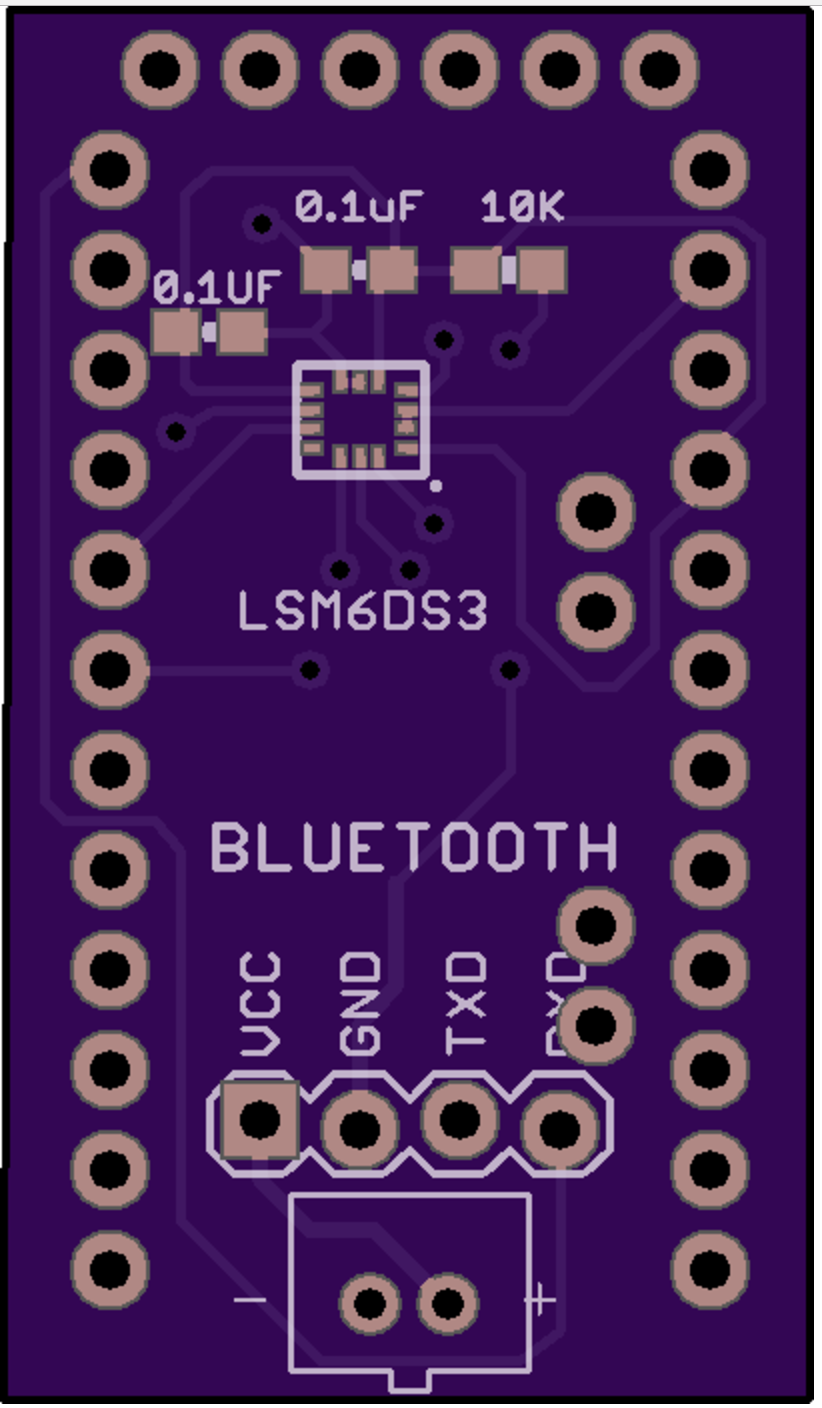
Ideally, I’d like a way to transmit Acceleration and Gyroscope data to the PC using bluetooth at the same time the pulseox is transmitting data over serial so I could look at both together. So, I’m using the HC-05 bluetooth module to transmit this data. The module connects to VCC, GND, TX and RX of the microcontroller. The HC-05 module itself is 3.3V, but has level conversion circuitry to accept 3.3V to 6V Vcc. As for the IC, I chose the LSM6DS3 because it is cheap, has 6DOF, a huuuge FIFO buffer, good libraries and circuit schematic I can base my design off of (Amazing souls at sparkfun). The LSM6DS3 communicates to the microcontroller through I2C and 3.3V logic. As bluetooth and the main chip were using 3.3V logic, it made sense to go with a 3.3V development board. I chose to use the Arduino Pro Mini (the 0.8mm version Sparkfun makes) with an atmega 328P. The whole thing can be powered by a 3.7V LiPo battery through a JST header. I managed to fit a 4 pin right angled header for the HC-05 module, the IMU and a JST header on the footprint of the pro mini to make a header. The bluetooth module can be connected into the female header. This is my first wholly contained wireless design. Some parts may take time to arrive, so I’m looking to get this board working by the end of this month.
I hope it works : )