Hello new and old friends! Welcome back to the Mech Ambassadors Blog! I am very excited to share with you all a project I am currently working on for my Mechatronic Product Design course.
MECH 423 is centered around learning and applying firmware knowledge to integrate what you have learned within your undergrad to a complex final project of your choice. This specific course teaches firmware writing to communicate with motor drivers, accelerometers, and encoders. Rather than a final exam, we have 3 labs and 1 final project which build up our final course grade. After polishing our C# and C, developing firmware for a close loop control system, we design our own final project which includes 3 deliverables: a proposal, a video of the final product, and a final report due 2 days after the presentation.
 The project is to be designed and presented on Dec.9th which is less than a month away. My lab partner and I just submitted our project proposal on Monday and are very excited to get a start on the robot. This final project comes with a multitude of challenges but we are aiming to integrate art and mechatronics in our device.
The project is to be designed and presented on Dec.9th which is less than a month away. My lab partner and I just submitted our project proposal on Monday and are very excited to get a start on the robot. This final project comes with a multitude of challenges but we are aiming to integrate art and mechatronics in our device.
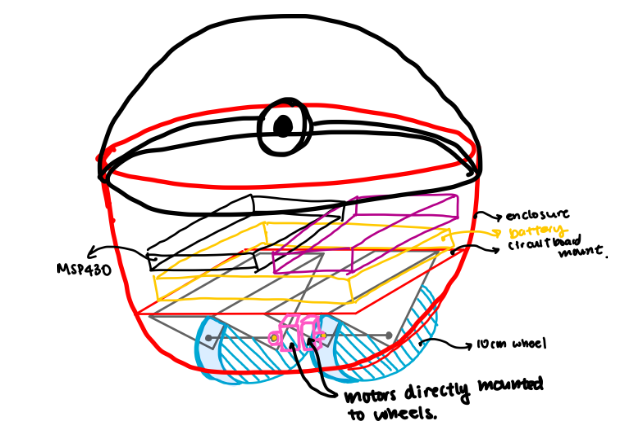
The objective of the project is to develop a self-balancing device using a dual motor control system. The device will take the appearance of a Pokeball, hiding all the hardware components within an enclosure and can open to show small figurines. The goal of the device is to balance the figurines contained within the device enclosure. The device will primarily function as an art form. There are many collectors who look for interesting workpieces, this self-balancing robot will be of great interest and act as a centerpiece! There is no circular self-balancing robot on the market at present, while there are designs for the Star Wars BB-8, as of this moment, there are no Pokeballs. We will be able to promote engagement in the STEM field by bringing to life a childhood cartoon object which will grasp the interest of students from kindergarten to grade 12.
Breaking down the project into 5 functions include: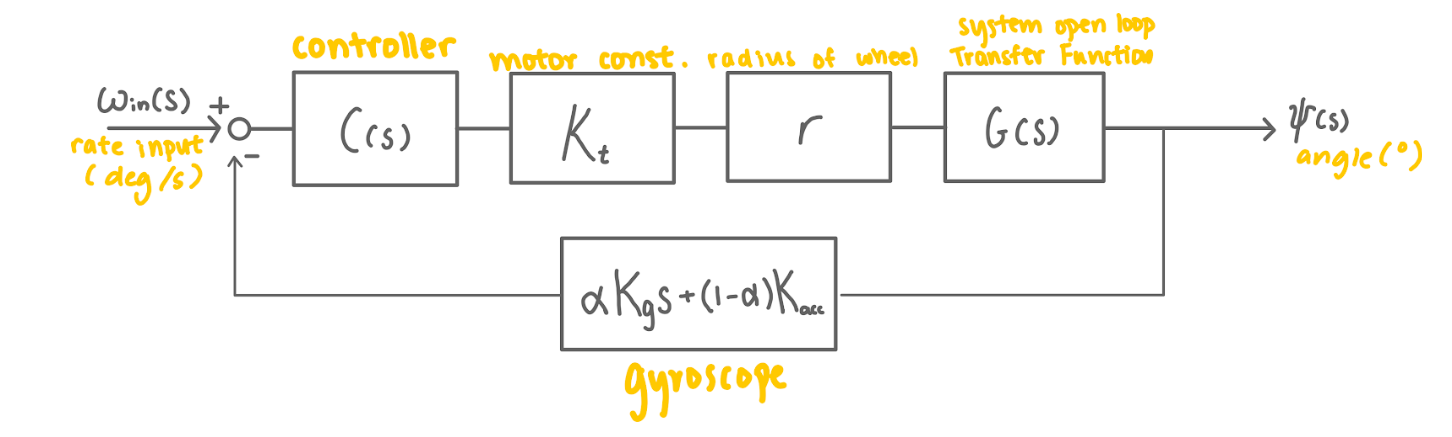
- Gyroscope interface circuit
- determine and measure the rate of angular motion of our device
- Filter with gyroscope and accelerometer
- integrate gyroscope and accelerometer to create a complimentary filter for angular position
- Motor driver
- operate 2 motors simultaneously and integrate the motors with the rest of the system
- Closed loop control
- use PI/D control to integrate all the systems together in a closed loop for stability
- Design and build
- Design the enclosure to mount the mechanical and electrical components.
We are waiting on approval before sourcing parts and starting on the design. Bookmark the blog and check back next week for updates!
May your gears always mesh!